Adaptive Robotic Chiseling
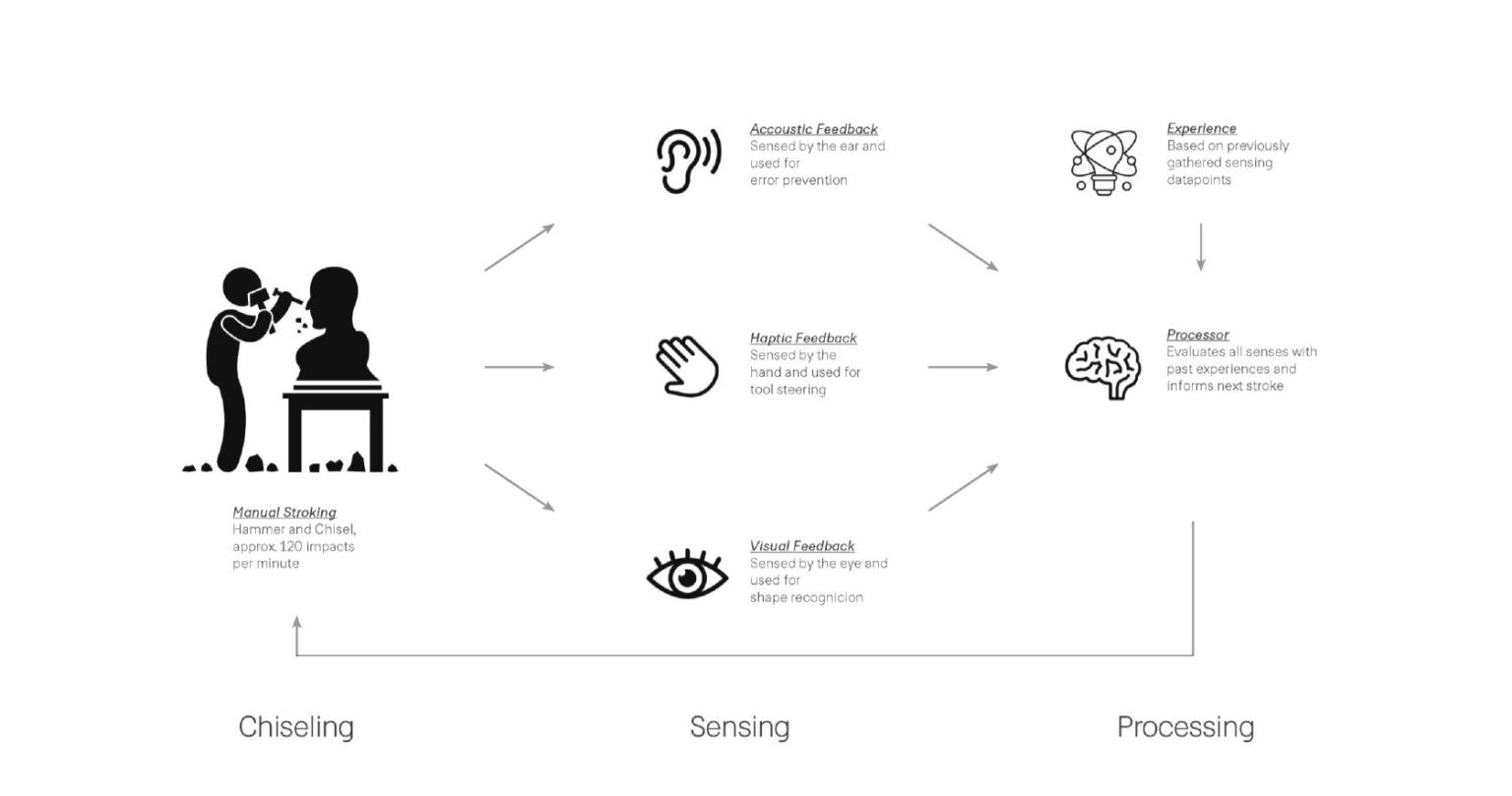
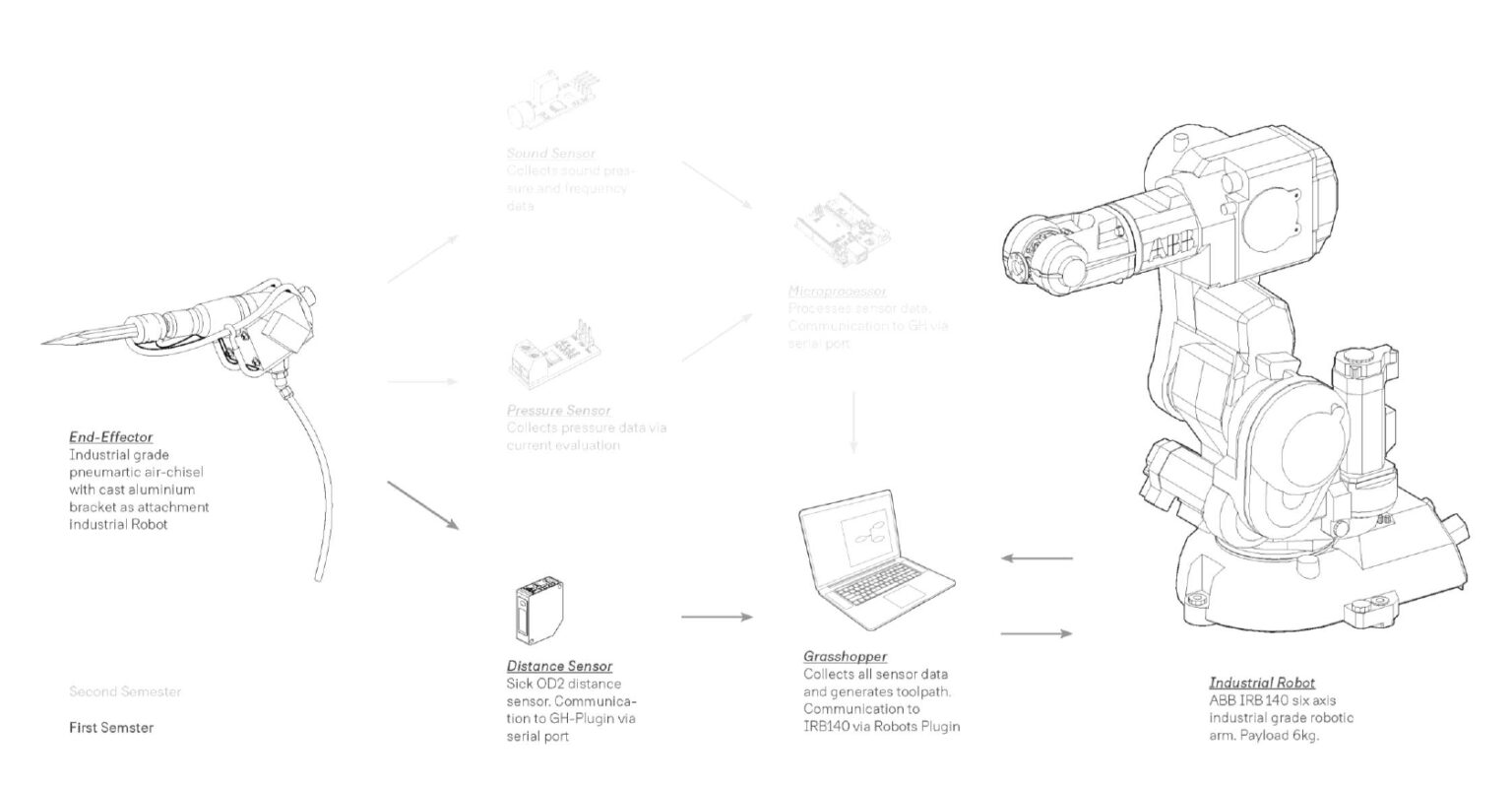
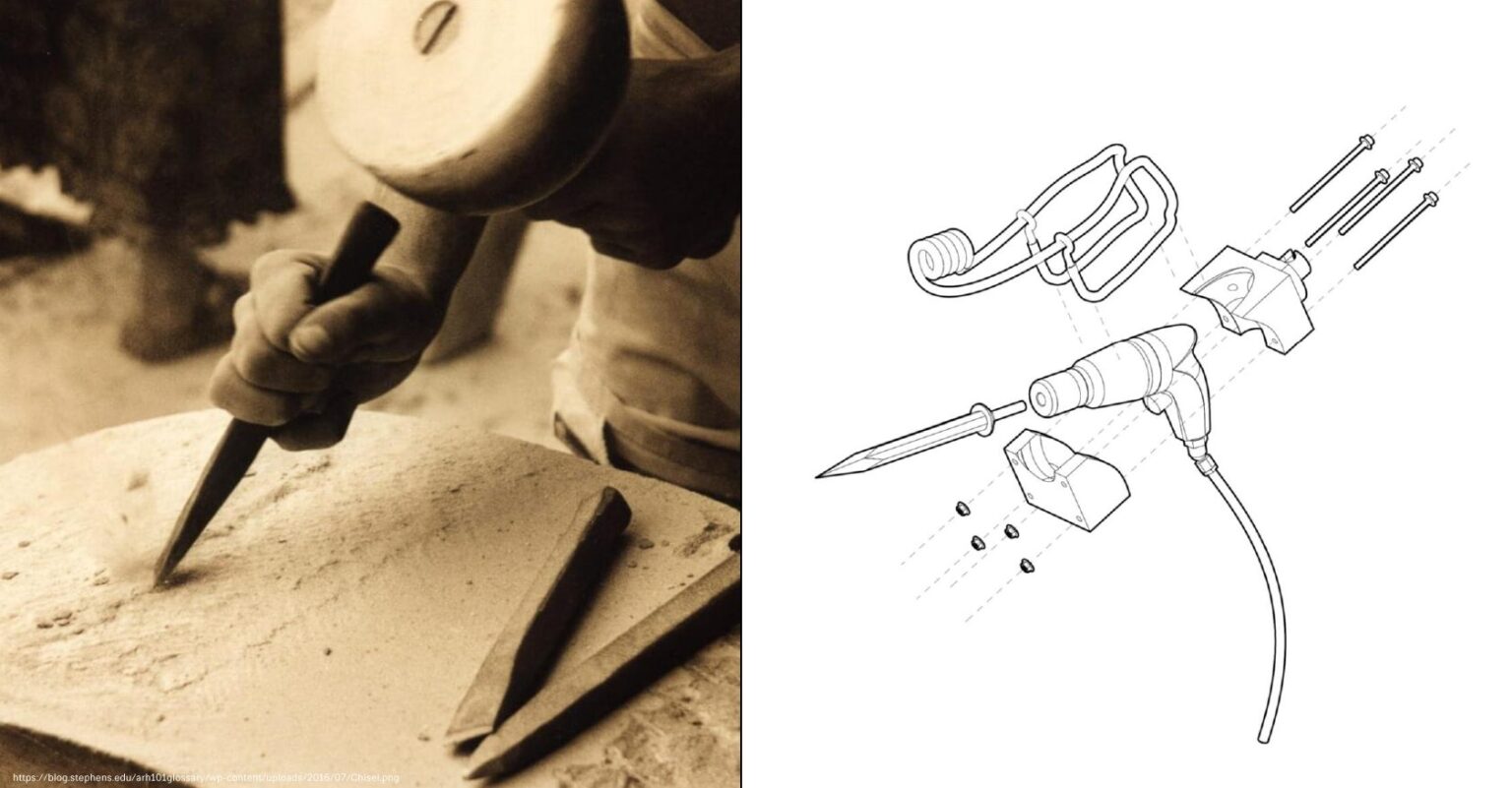
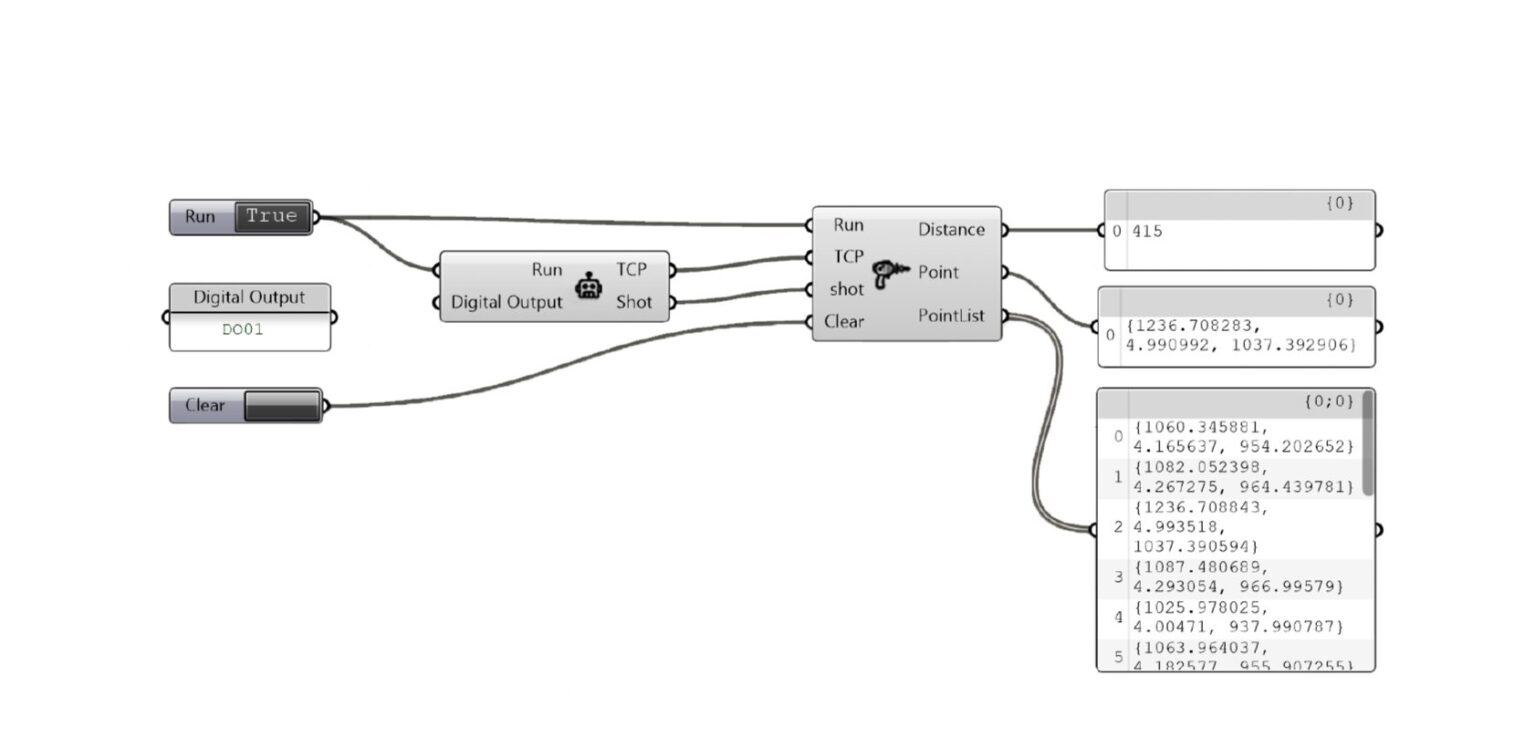
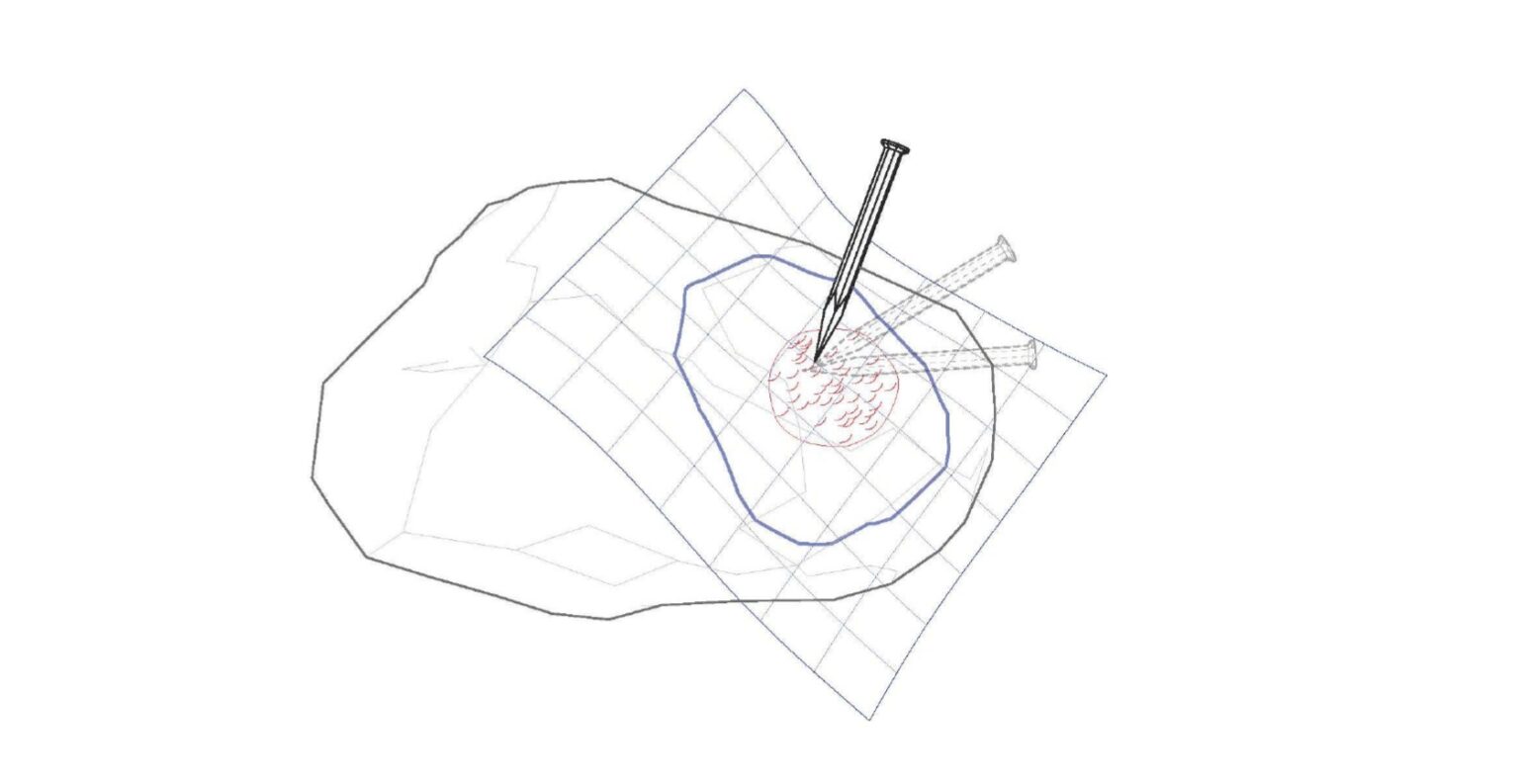
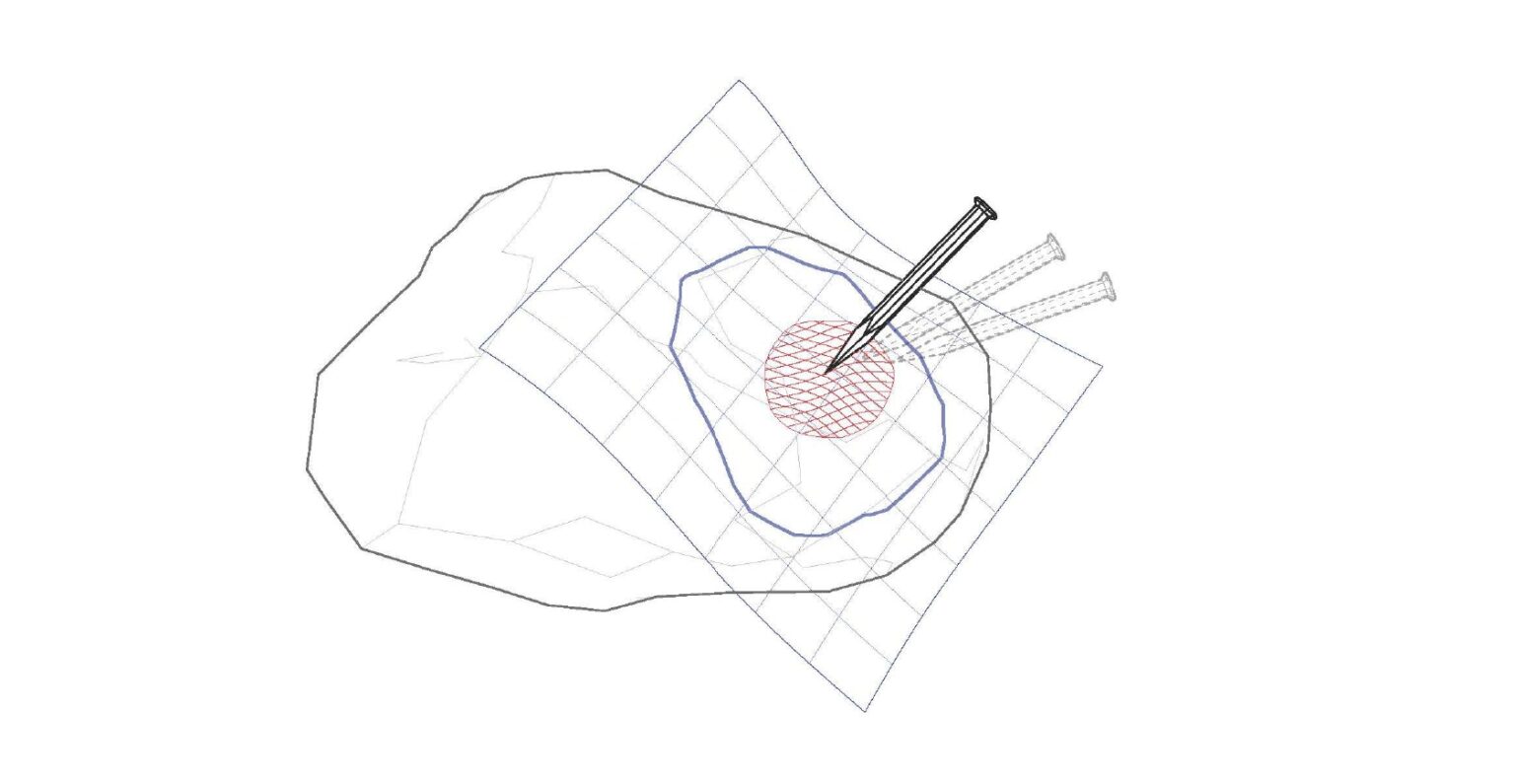
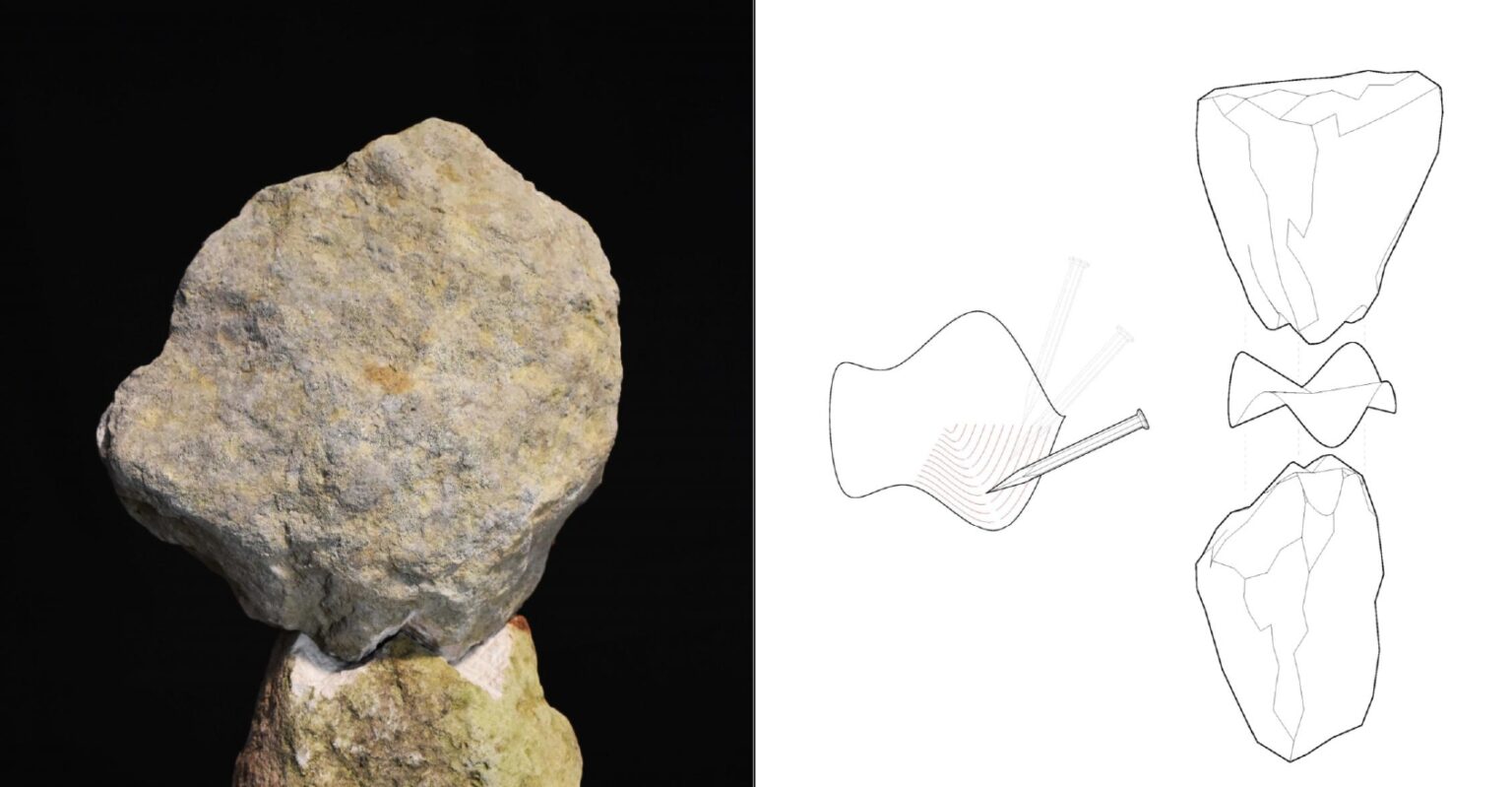
This project explores how traditional stone chiseling practices can be translated into an adaptive robotic workflow. By emulating the multi-sensory feedback loop of a skilled stonemason—integrating sight, touch, and sound into digital sensors and algorithms—it establishes an approach that can handle the complexity and unpredictability of natural stone. This involves a custom robotic setup, which includes a pneumatically driven chisel and specialized sensing hardware, as well as a digital communication framework to manage data flow and motion planning.
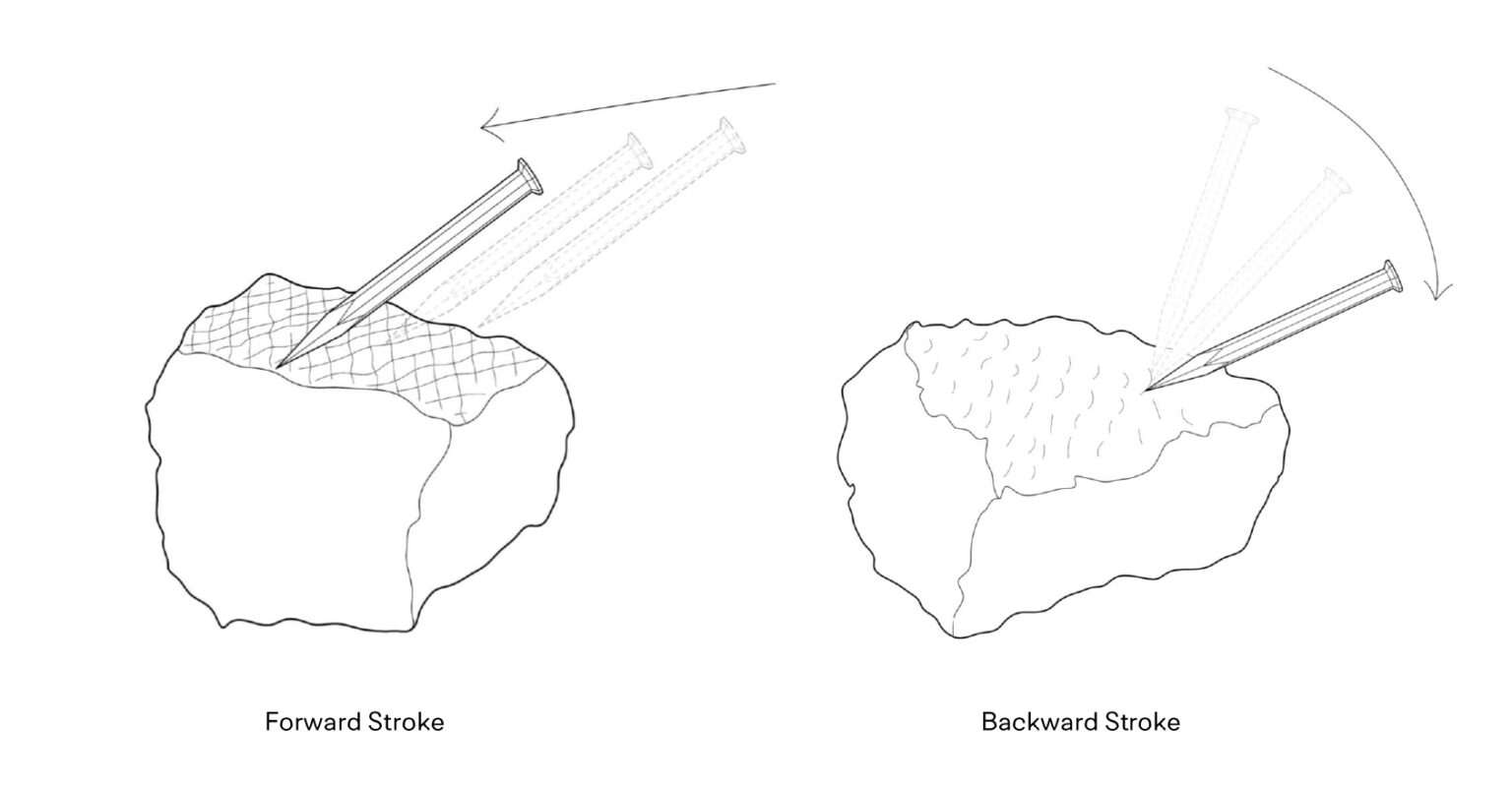
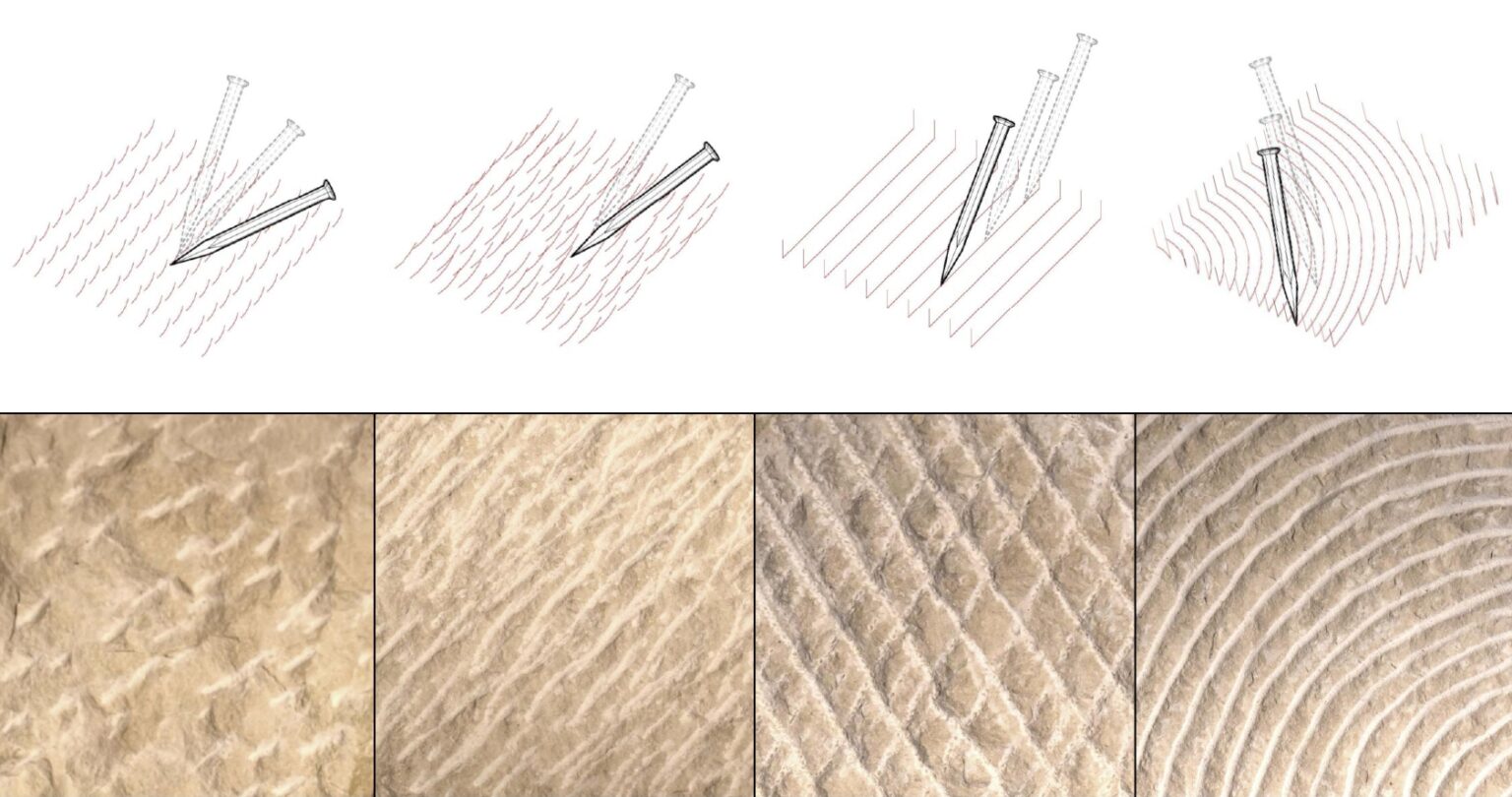
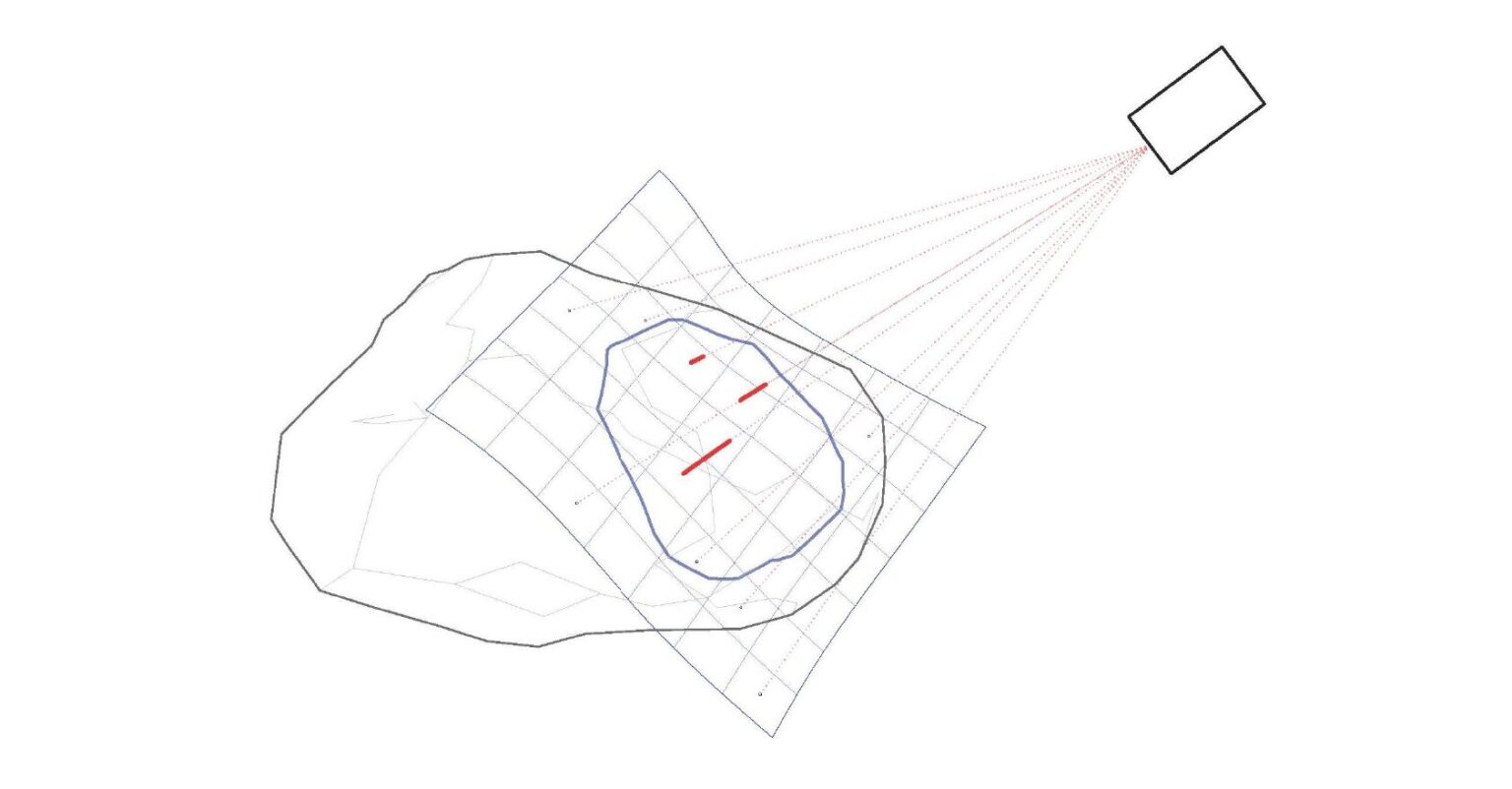
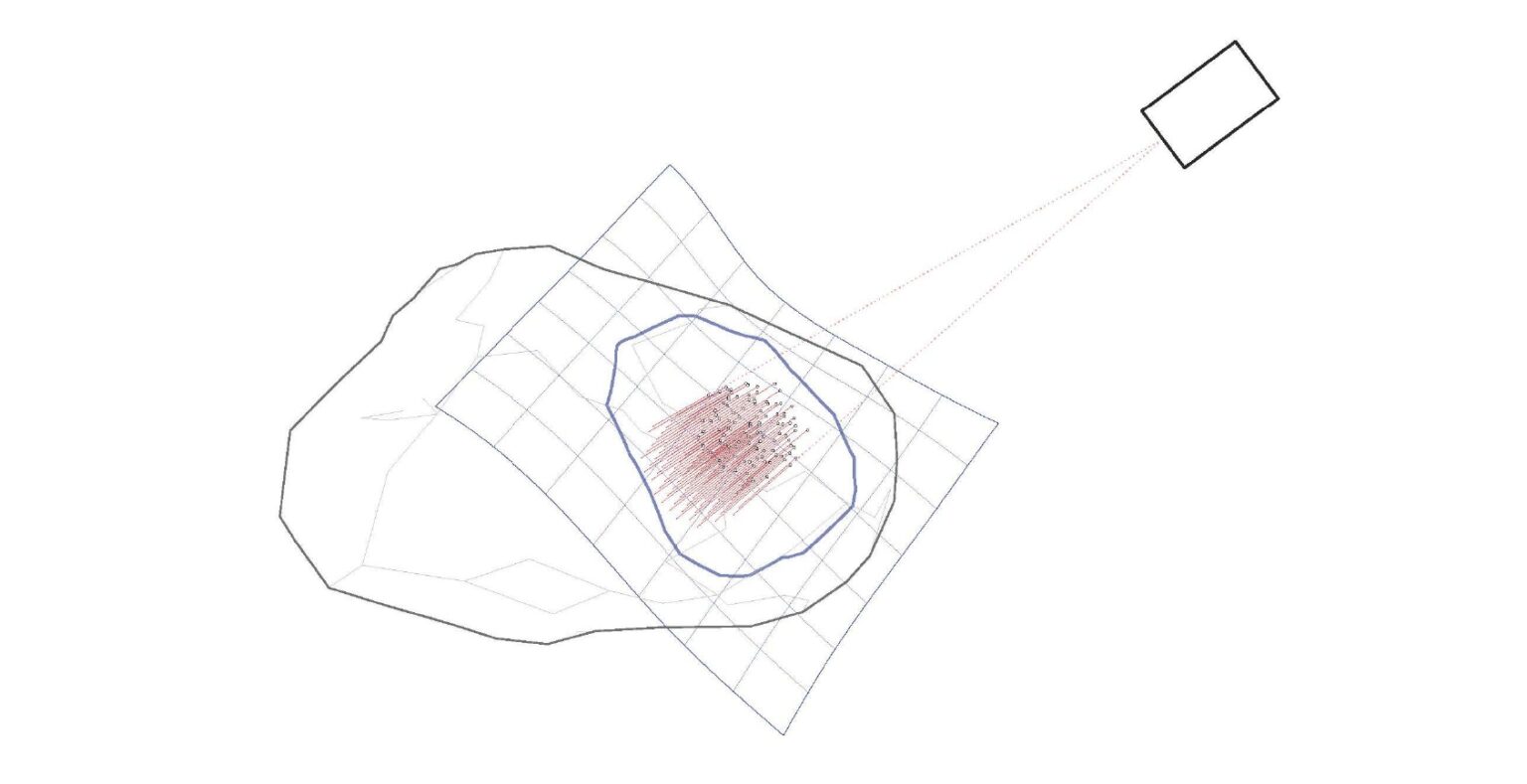
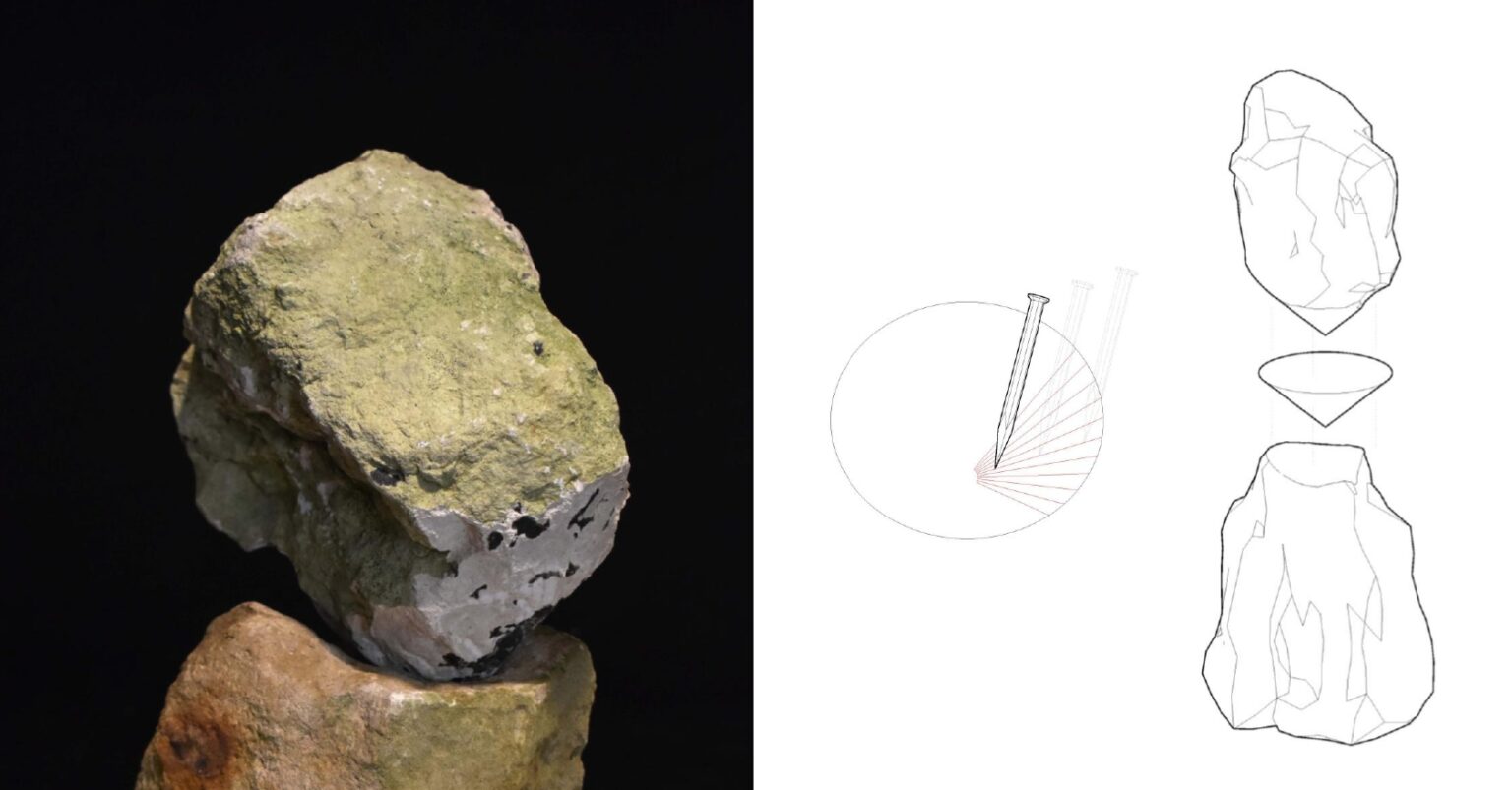
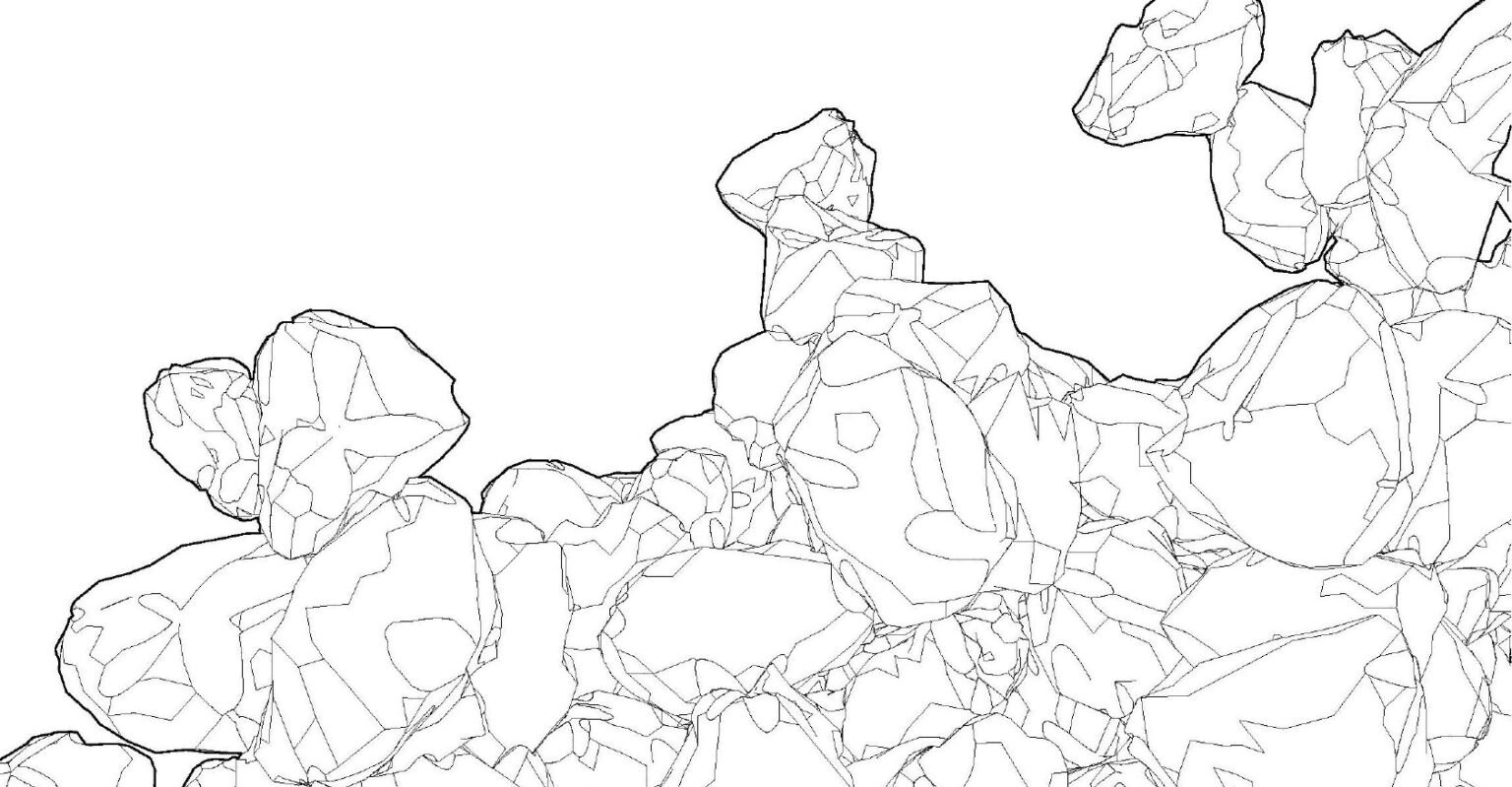
Through experiments in "digital craftsmanship," the robot learns to scan the stone surface, identify target areas, and choose the appropriate chiseling technique. Traditional manual strokes are reimagined as parametric toolpaths, combining rough material removal with fine, controlled finishing passes. Innovative joint geometries between stones are also explored, enabling new structural and spatial possibilities by fitting irregular boulders together with precision.
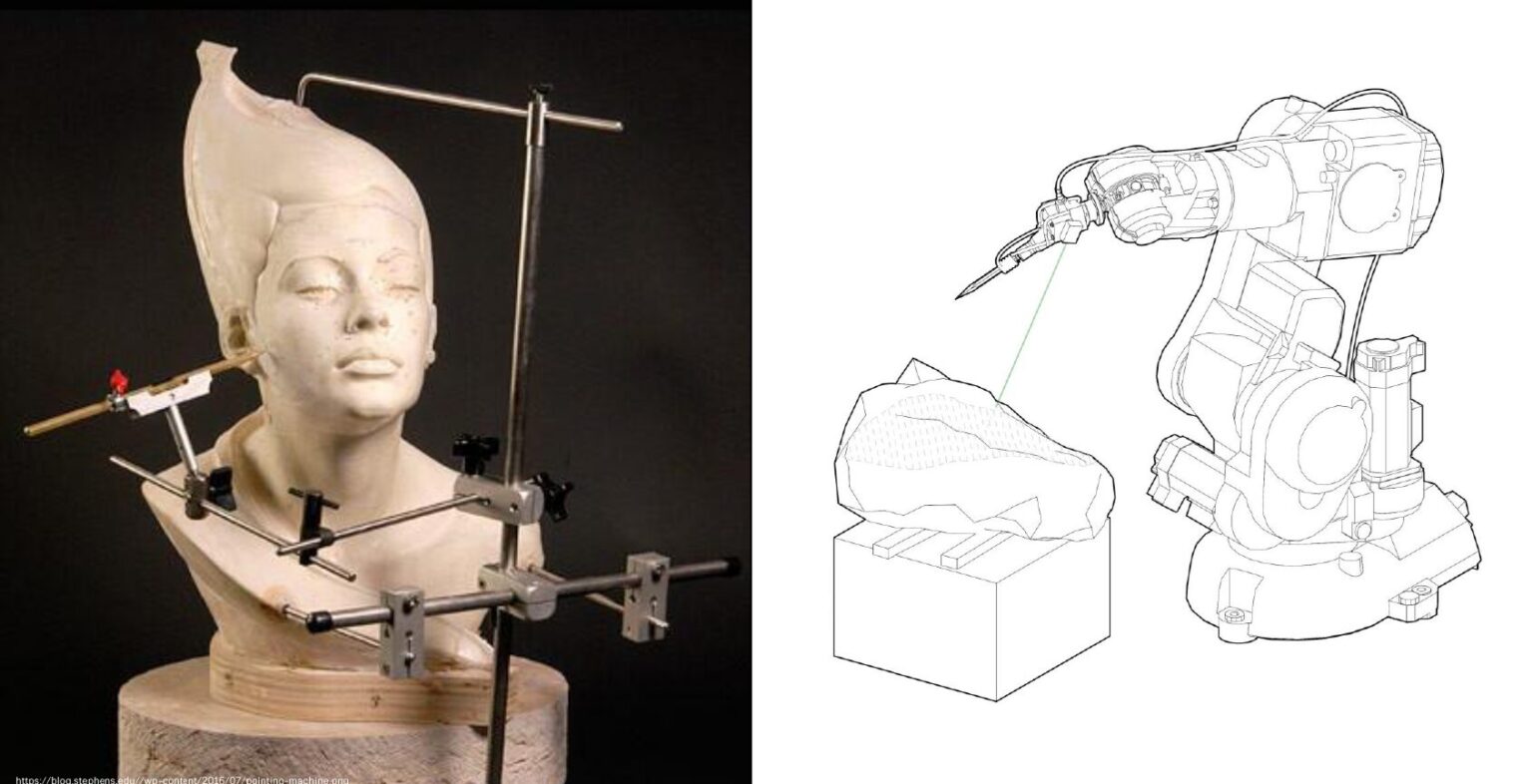
The workflow bridges tactile heritage methods—like the pointing machine, historically used to replicate sculptures—with state-of-the-art robotic automation. The sensors and algorithms developed allow the robot to "feel" its way through the stone, adapting its approach as conditions change. This adaptability fosters a higher level of detail, sensitivity, and structural integrity in robotic stone cutting, broadening the potential for natural materials in contemporary architecture.
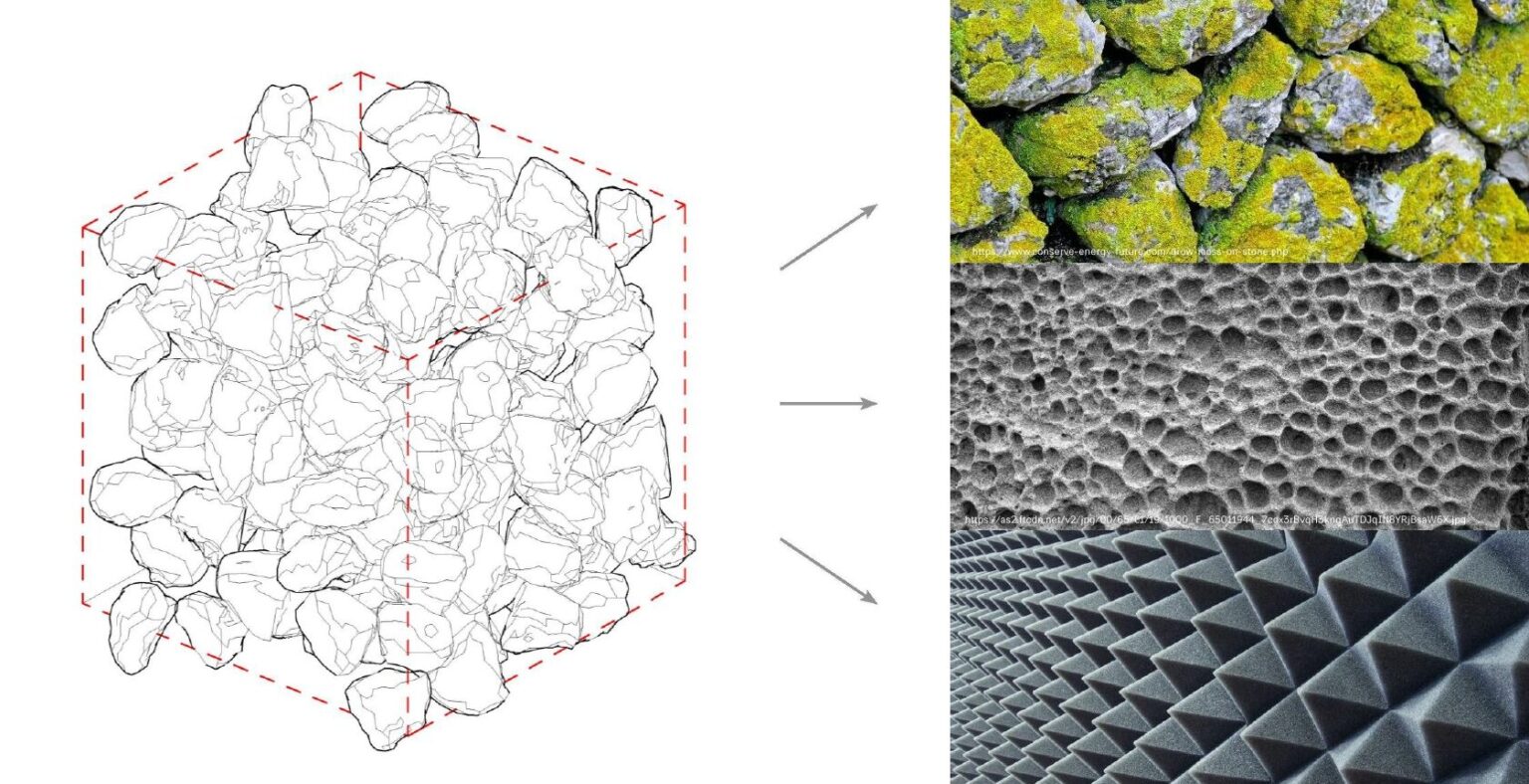
Ultimately, the system points toward a future where digital material concepts merge with artisanal techniques. By leveraging robotic intelligence and digital data, architects and craftsmen can create porous, acoustically rich structures that nurture biological growth and respond dynamically to environmental contexts. This synergy between old and new expands the repertoire of building methods and material assembly, promising more resilient, sustainable architecture.
Project Credits
- Concept
- Sandro Siefert
- Supervisor
- Tom Svilans
- Programming
- Sandro Siefert
- Fabrication
- Sandro Siefert
- Workshop & Robot
- CITA
- Imagery
- Sandro Siefert
Gallery